近日,中国-莫桑比克智慧农业“一带一路”联合实验室(筹)农田智慧管理与装备创新中心团队在无人机覆盖路径规划(Coverage Path Planning,CPP)领域取得最新研究进展。相关论文《GL-AHG: A Novel Game-Learning Alternating Hierarchical Genetic Algorithm for UAV-Enabled Coverage Path Planning》以长文形式在线发表于移动计算领域顶级期刊《IEEE Transactions on Mobile Computing》。浙江师范大学硕士研究生周良科为第一作者,唐长兵副教授和刘洋教授为通讯作者。
现有CPP方法普遍将航路点生成与路径规划视为两个解耦的阶段。航路点生成往往基于固定的几何模式(如Z字形、螺旋线),路径规划只是在给定航路点上的顺序优化。这种割裂的处理方式导致了一个根本性问题:航路点生成阶段忽视了能量优化需求,预定了能量消耗的理论下限。换言之,即使路径规划算法再优秀,如果航路点本身不是能量最优的,最终的能量消耗也无法达到最优。
研究团队将航路点生成问题等价转化为加权顶点覆盖(Weighted Vertex Cover,WVC)问题,这一转化最关键的步骤包括:
1)能量消耗映射到顶点权重
将无人机从一个邻接航路点飞抵目标航路点的能量消耗,映射为该目标航路点的权重。这一映射的巧妙之处在于:传统方法中,能量只是路径规划阶段的优化目标;而本文将其前移至航路点生成阶段,使得航路点的选择从一开始就以能量最小化为导向。这是从“几何视角”到“能量视角”的根本模式转变。
2)能量消耗与顶点覆盖耦合
经过上述映射,原始CPP问题转化为:选择一组顶点(航路点)覆盖所有边(覆盖关系),使得所选顶点的总权重(总能量消耗)最小。这正是经典的加权顶点覆盖(WVC)问题——一个被广泛研究的组合优化问题。通过这一转化,本文成功地将“覆盖所有区域”和“最小化能量消耗”这两个原本分阶段处理的目标,统一到了同一个优化框架中。
本文文献[46]研究表明路径规划天然地倾向于减少垂直机动并更好地协调垂直和水平运动,本文WVC形式化恰好捕捉了这种协调关系。
研究团队在八座山峰以及浙江金华婺城区真实地形场景上,将GL-AHG与BF、Spiral、HO-CTP、APPMS、MOEA-2DE、MOEA/D代表性算法进行了系统对比。实验表明:GL-AHG在所有测试场景中均取得最优性能,在真实复杂地形下的表现尤为突出,验证了该方法从“源头”(航路点生成)优化能量的核心优势。具体实验结果见以下图表。
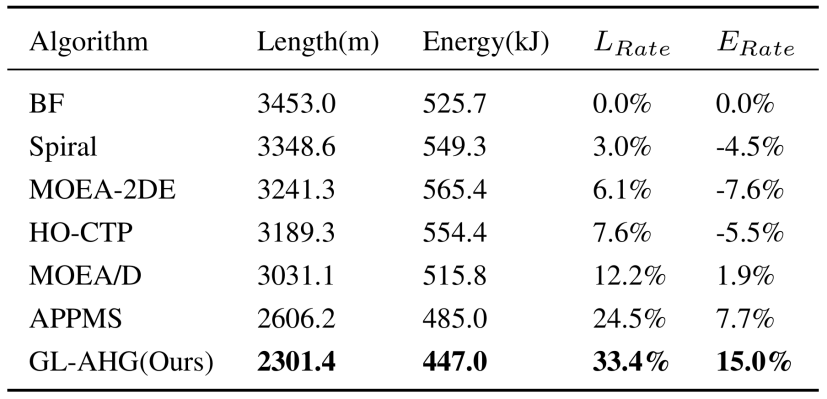
表1八座山峰的仿真结果
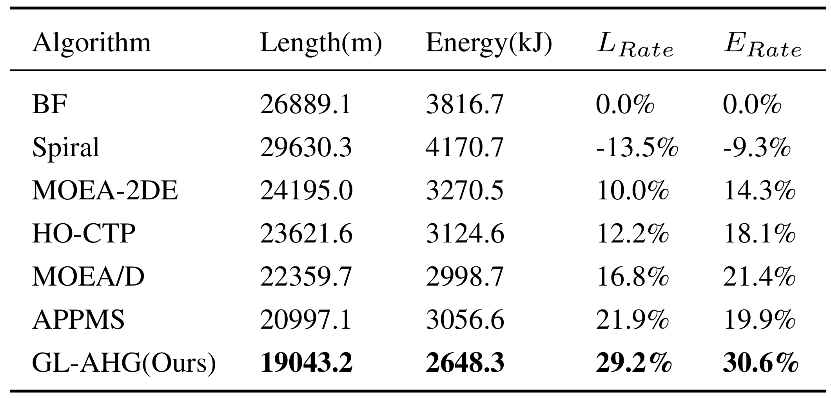
表2实际山地地形的仿真结果
IEEE Transactions on Mobile Computing(IEEE TMC)属于移动计算领域的三大顶刊之一,是中国计算机学会(CCF)推荐A类期刊。浙江师范大学为论文第一完成单位和通讯单位。该研究工作得到了国家重点研发项目(2024YFE0214000)、国家自然科学基金、浙江省自然科学基金的资助。
论文链接:https://ieeexplore.ieee.org/document/11478643

 学校官网
学校官网 英文网站
英文网站